IBM just open sourced these generative AI coding models
News IBM has open sourced models trained on code written in 116 programming languages - and it could make life a lot easier for enterprise developers



News RSA keynote paints a terrifying picture of billion-plus GenAI users facing innovative criminal tactics
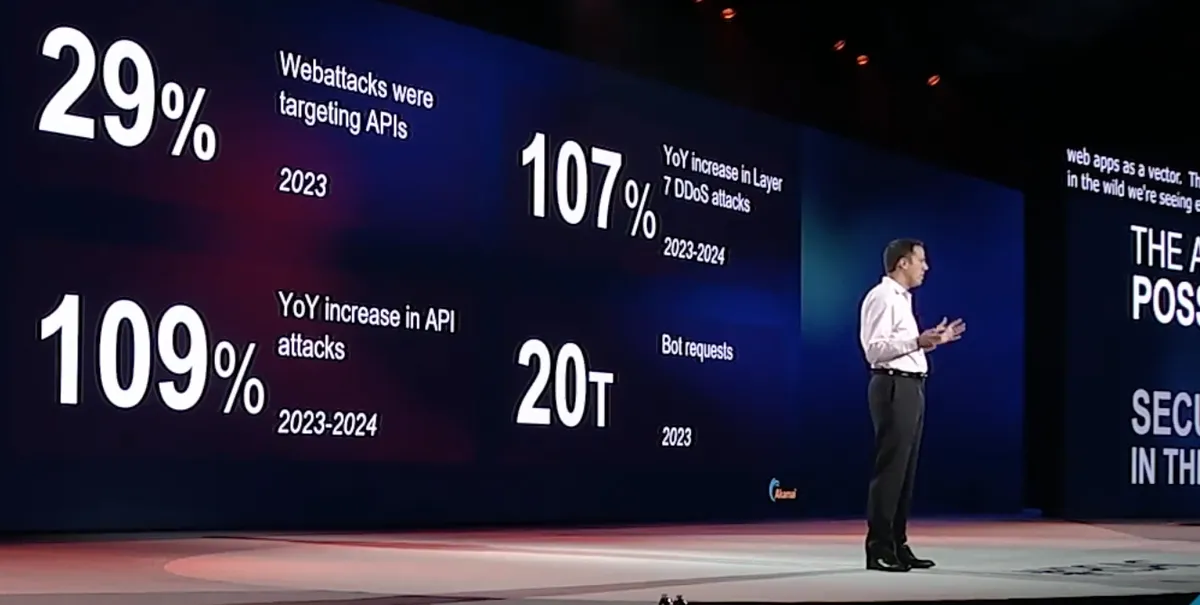
NEWS Apps and APIs bear the brunt as threat actors pivot to living off the land

News OpenAI's large language models will now be trained using millions of questions drawn from the developer knowledge site

whitepaper A payment method that lets users purchase their desired cryptocurrency

whitepaper Employing a security-by-default approach with the latest Windows 11 Pro devices

whitepaper Why and how to gain your customers’ trust with your AI and digital transformation strategy
ITPro Podcast As AWS was hit with $525 million in damages, April also saw leaders hit with difficult choices over ransomware and AI

In-depth Innovative deepfake technology is powering the next generation of social engineering attacks, – preventing deepfake attacks should be a priority for any security team

Industry Insights In an ever-shifting technological landscape, traditional Managed Service Providers (MSPs) may not cut it anymore. Discover why businesses are turning to niche providers for agile, adaptable network solutions

Case study In its organization-wide adoption of Microsoft’s AI tool, Barnsley Council hopes it can save its social workers hours spent on admin that could be better spent serving the community

Reviews With a 2U 30-bay all-flash array, powerful hardware specification, high memory capacity, and plenty of room for further expansion, the TS-h3077AFU is in a league of its own

Reviews A great value desktop NAS with dual Thunderbolt 4 ports but software development has a way to go

Reviews The DL560 has a unique closed-loop liquid cooling system capable of handling a diverse range of heavy-duty workloads

Reviews Good design, strong ergonomics, impressive performance, and a bigger screen make this a brilliant, business-ready Chromebook for long working days
ITPro Podcast As AWS was hit with $525 million in damages, April also saw leaders hit with difficult choices over ransomware and AI
ITPro Podcast Better public and private sector collaboration is needed if the UK’s AI approach is to match the ambition of other nations

ITPro Podcast With the EU AI Act’s sweeping requirements on their way, companies will need to take precise steps to demonstrate AI risk management

ITPro Podcast Google's data heritage could be just the right ingredient as it takes on the AI market at scale

ITPro 20/20 The technology, policies, and markets likely to shape IT decision-making in the year ahead

ITPro 20/20 A look at the shady world of cyber security networking and online communities

ITPro 20/20 Issue 32 looks at the problems that can arise when businesses choose to embrace flashy terminology at the expense of simplification
ITPro 20/20 Advancements in the core technology mean holograms could soon become instrumental in eliminating the worst aspects of hybrid work